12 September 2020: Clinical Research
Radiological and Clinical Differences between Tinavi Orthopedic Robot and O-Arm Navigation System in Thoracolumbar Screw Implantation for Reconstruction of Spinal Stability
Jinpeng Du1CDE, Lin Gao1BE, Dageng Huang1CD, Lequn Shan1BC, Wentao Wang1BF, Yong Fan1BF, Dingjun Hao1G, Liang Yan1AG*DOI: 10.12659/MSM.924770
Med Sci Monit 2020; 26:e924770






Abstract
BACKGROUND: Pedicle screw fixation is one of the most commonly used methods in spine surgery. We introduce a surgical robot system from China based on 3-dimensional fluoroscopy imaging and compare it with the commonly used O-arm navigation system. We study the differences in accuracy, safety, and clinical effect in auxiliary pedicle screw fixation.
MATERIAL AND METHODS: Patients who underwent thoracolumbar internal fixation in our hospital from 2017 to 2019 were divided into a robot and navigation group according to whether surgery was assisted by the Tinavi orthopedic robot or O-arm navigation system. Imaging data of patients were searched from the image system and accuracy of screw implantation was measured by Rampersaud A to D grade classification. Deviation sagittal, deviation transversal, and facet joint violation were also measured and calculated.
RESULTS: In total, 306 patients were included: 136 patients in the robot group with 760 screws implanted; 166 patients in the navigation group with 908 screws implanted. The accuracy of “perfect” and “clinically acceptable” pedicle screw implantation was 96.2% and 99.6%, respectively, in the robot group and 90.5% and 96.7%, respectively, in the navigation group, with a significant difference between the 2 groups (P<0.05). The sagittal and transversal deviations in the robot group were significantly less than those in the navigation group (P<0.05).
CONCLUSIONS: The Tinavi orthopedic robot can significantly improve surgical accuracy and safety of pedicle screw fixation, as compared with that of O-arm navigation technology, without increasing complications. It shows great potential in clinical application.
Keywords: Bone Screws, Dimensional Measurement Accuracy, Patient Navigation, Robotics, Spine, Lumbar Vertebrae, Pedicle Screws, Robotic Surgical Procedures, Spinal Fusion, Surgery, Computer-Assisted
Background
Pedicle screw fixation is one of the most commonly used surgical methods in spine surgery and plays an important role in the reconstruction of spinal stability. The shape of the vertebral pedicle is complex and has a certain variability. The average width of the spinal pedicle in Asian populations is only about 8 mm [1], making the accurate implantation of pedicle screws challenging. Most traditional spinal surgeons complete the implantation of pedicle screws free-hand, making it difficult to prevent the pedicle screws from piercing the pedicle cortex and injuring important surrounding tissues such as nerves and blood vessels. It is reported in the literature that the failure rate of pedicle screw internal fixation is 4.9% to 37.5% [2–4], and the incidence of neurological complications are 0.18% to 3.24% per pedicle screw [5].
To improve the accuracy of pedicle screw fixation, computer-aided navigation systems were created. By registering the preoperative or intraoperative computed tomography (CT) image data with the computer navigation system, doctors can calculate the width of the pedicle and design the optimal channel for pedicle screw implantation. Among computer-aided navigation systems, the O-arm real-time navigation system is the most common, providing operators with high-quality 2-dimensional (2D) and 3-dimensional (3D) images during surgery, tracking surgical instruments in real time, and guiding the accurate placement of pedicle screws. It is reported that the accuracy of screw placement with the O-arm real-time computer-aided navigation system is 96.6% to 97.93% [6,7].
In recent years, surgical robot technology has developed rapidly, and a variety of surgical robot systems have been used in the field of spinal surgery. Among these, the Renaissance system with positioning technology, which was developed in Israel and certified by the FDA and CE, is the best known. However, our previous study found that, compared to the O-arm system, the Renaissance robot has no clear advantage in terms of accuracy of screw implantation [8]. Therefore, considering the high cost of using the Renaissance robot, the less costly O-arm navigation system is still commonly used in our center. Recently, a new surgical robot system based on 3D imaging (codesigned by Beijing Jishuitan Hospital and TINAVI Medical Technologies Co., Ltd.) was introduced in China (Figure 1). In this study, we compare the Tinavi robot system to the commonly used O-arm navigation system and study the radiological and clinical differences in thoracolumbar screw implantation for reconstruction of spinal stability in regards to accuracy, safety, and clinical effect.
Material and Methods
STUDY DESIGN AND SUBJECTS:
Patients who received thoracolumbar internal fixation assisted by the Tinavi orthopedic robot or the O-arm navigation system in our hospital from 2017 to 2019 were analyzed retrospectively. The inclusion criteria were as follows: (1) age 18–70 years; (2) surgery was in accordance with the operative indication (requirement for reconstruction of spinal stability with pedicle deformity or not) of robotic- or navigation-assisted pedicle screw placement; and (3) reexamination of CT after surgery to determine the accuracy of screw implantation. The exclusion criteria were as follows: (1) severe osteoporosis; (2) history of thoracolumbar revision surgery; and (3) key clinical data were incomplete. After screening, eligible patients were divided into the robot and navigation groups according to whether they were assisted by the Tinavi orthopedic robot or the O-arm navigation system during surgery. We retrospectively accessed their clinical data in the electronic medical records and the imaging data in the picture archiving and communication system. The Ethics Committee of Xi’an Honghui Hospital approved the study and determined the retrospective study design did not require the informed consent of patients.
TINAVI ROBOT-ASSISTED INTERNAL FIXATION: After general anesthesia was administered, patients were put in the prone position, and the position of the target vertebra pedicle and spinous process was marked to fix the tracker on the skin. The tracker was fixed on the upper or next segment of the surgical segment, and the tracker and positioning ruler were installed at the end of the robot arm. The positioning ruler was adjusted as close to the skin of the surgical area as possible (about 5 mm from the skin), so that the marked points on the mechanical arm tracker were located in the visual field of the 3D C-arm (Siemens Medical Solutions, Erlangen, Germany) (at least 4 marked points were included in the anteroposterior and lateral fluoroscopy and target vertebra), and the scan was carried out. The 3D image was transmitted to the robot workstation for automatic registration, and the channel of pedicle screw placement was planned according to the 3D image, including the screw entry point, direction, and specification. According to the planned trajectory, the position of the end of the robot arm was adjusted. After the robot stopped, the guiding cannula along the robot arm guider was inserted, the position for implantation at the skin was marked, and the skin was cut longitudinally. The guiding cannula fully expanded the soft tissue to contact the bony surface. The electric drill was implanted with the guiding pin along the direction of the guiding cannula (keeping a certain speed of the drill), usually with a depth of 2 to 3 cm. The guiding cannula was removed, and the above process was repeated to complete the implantation of the remaining guiding pins in turn. C-arm fluoroscopy was used to determine the position of the guiding pin, and when satisfactory, the sleeve was used to expand the soft tissue step by step. The pedicle screw was placed along the pin through tapping and other means, and the position of internal fixation was again verified by fluoroscopy. When necessary, decompression, fusion, and other surgical procedures were performed later. The workflow of the Tinavi robot is shown in Figure 2.
O-ARM-BASED NAVIGATION SYSTEM GUIDED INTERNAL FIXATION:
The assistance of the O-arm-based navigation system for surgery included 5 steps: 1) the reference frame was fixed on the spinous process of the adjacent segment of the target vertebral body or iliac wing; 2) the O-arm continuously reconstructed 3D images from 360° fluoroscopy in 3D mode and uploaded them to the workstation; 3) the guiding tool was automatically registered, and then bone anatomical markers for accuracy calibration were selected; 4) entry point and screw trajectory were identified using a navigation probe; and 5) a curved pedicle probe was inserted and then the pedicle screws were inserted. When necessary, decompression, fusion, and other surgical procedures were performed later.
THE ACCURACY OF SCREW INSERTION: All patients had a postoperative CT examination before discharge. The postoperative CT image data were measured using the picture archiving and communication system, and the position of the pedicle screw was independently evaluated by 2 spinal surgeons who did not participate in the surgery; disputes were resolved through discussion. The accuracy of screw placement was evaluated according to Rampersaud A to D classification [9] as follows: Grade A, the screw is completely within the pedicle; Grade B, the screw penetrated the pedicle’s cortex <2 mm; Grade C, the screw penetrated the pedicle’s cortex <4 mm; and Grade D, the screw penetrated the pedicle’s cortex ≥4 mm. Grade A is regarded as “perfect” screw implantation, Grade A+B is considered as “clinically acceptable” screw placement, and Grades C and D are considered “poor” screw placement positions (Figure 3). Intraoperative screw revision during surgery was directly recognized as Grade D. To compare the consistency between the actual pedicle screw placement and the planned virtual screw placement during the operation, we referred to the method proposed in the literature [10], whereby the inclination angles of the virtual screw channel and the actual implanted screw were measured in the sagittal and transversal images of intraoperative planning and postoperative CT scan (Figure 4), and the deviation between the pedicle screw placement angle and the pre-designed angle of the virtual screw channel was compared.
FACET JOINT VIOLATION: Facet joint violation was evaluated according to the classification described by Kim et al. [10] where Grade 0 indicates no impingement, Grade 1 indicates the screw head was in contact or was suspected to be in contact with the facet joint, and Grade 2 indicates the screw clearly invaded the facet joint.
SECONDARY PARAMETERS:
Clinical outcomes such as time for surgery, adverse events, intraoperative blood loss, postoperative stay, postoperative revision of misplaced screws, and postoperative neurological evaluation were collected. Data of intraoperative fluoroscopy time was lost and, therefore, is not available.
SUBGROUP ANALYSIS:
The indication for placement is an important factor because many conditions can alter the shape and geometry of pedicles. We define pedicle variation and deformity as difficult screw implantation, such as pedicle rotation and pedicle isthmus fracture. In addition, considering that the location of screw implantation and the BMI of patients may be potential factors affecting the accuracy of screw implantation, we conducted a subgroup analysis to observe the differences of some of the primary indicators within the subgroups.
STATISTICAL ANALYSIS:
SPSS20.0 statistical software (SPSS, Inc., Chicago, Illinois, USA) was used for statistical analysis. Chi-squared test was used for counting data such as the accuracy of pedicle screw placement in the 2 groups, mean±SD was used to describe normal distribution data, independent sample
Results
ACCURACY OF PEDICLE SCREW PLACEMENT:
The accuracy of “perfect” and “clinically acceptable” pedicle screw implantation in the robot group was 96.2% and 99.6%, respectively, while in the navigation group it was 90.5% and 96.7%, respectively (Table 2), with a significant difference between the 2 groups (P<0.05). However, the results of subgroup analysis showed that there was no statistical difference in the accuracy of “clinically acceptable” screw implantation between the 2 groups in the thoracic vertebrae subgroup (P=0.189) (Table 3). The sagittal and transversal deviations in the robot group were also significantly less than those in the navigation group (P<0.05). However, there was no significant difference in intraoperative revision of screws between the robot group (0.4%) and the navigation group (0.9%) (P=0.222).
FACET JOINT VIOLATION:
The Grades 0–2 facet joint violation in the robot group were 98.8%, 1.2%, and 0%, respectively, and 97.4%, 2.0%, and 0.6% in the navigation group, respectively. The proportion of Grade 0 (no facet joint invasion) in the robot group was significantly higher than that in the navigation group (
CLINICAL OUTCOMES:
The time for surgery, intraoperative blood loss, and postoperative hospital stays in the robot group were significantly lower than those in the navigation group, and the differences were statistically significant (P<0.05) (Table 4). In the robot group, there were 4 cases (2.9%) of adverse events: 2 cases of dural tear, and 1 case each of intraoperative repair and postoperative symptomatic treatment. The patient requiring intraoperative repair had a hematoma compression, which was revised urgently to remove the hematoma. The patient requiring postoperative treatment had wound exudation and non-healing after an open operation, and the wound healed within 3 weeks after wound revision and debridement. There were no screw-related neurological complications in the robot group. A total of 9 (5.4%) patients in the navigation group had adverse events, and 2 (1.23%) patients underwent screw revision because the screw penetrated the inner cortex of the pedicle and stimulated the nerve root. There was no significant difference in the incidence of adverse events between the robot group and the navigation group (P=0.309).
Discussion
INTRODUCTION OF THE TINAVI ROBOT SYSTEM:
The Tinavi robot system is a robot-assisted total orthopedic surgery instrument, consisting of a mobile 6-degree-of-freedom manipulator system, an optical tracking system, and an operation planning and navigation system (Figure 1). During surgery, doctors can plan the predetermined channel of pedicle screw implantation through the operation planning system, based on 3D images. The manipulator system can automatically calculate the spatial position of the predetermined channel of the pedicle screw and, with the cooperation of the optical tracking system, control the manipulator with the guide tool attached to the end of the manipulator to locate the predetermined channel and guide the operator to accurately implant the pedicle screw through the guiding cannula and pin (Figure 5). The optical tracking system can detect the position of the patient and the position changes of the patient from various causes in real time and cooperate with the manipulator system for real-time motion compensation so that the manipulator system can always accurately locate the pre-designed pedicle screw implantation path.
At present, a variety of surgical robot systems have been used in the field of spinal surgery, including SpineAssist/Renaissance, SPINEBOT, VectorBot, and ROSA, among which the SpineAssist/Renaissance system developed in Israel is the best known. Although the SpineAssist/Renaissance spinal robot has a high accuracy of pedicle screw placement [11–14], there is still misplacement of guide wires and screws with this device [15,16]. In addition, SpineAssist/Renaissance has some defects, including complex operation and lack of real-time image monitoring [17]. The Tinavi orthopedic robot system, independently developed in China, has been used in spine, trauma, and other surgical fields. At present, there are few studies demonstrating the accuracy of pedicle screw placement with the Tinavi robot or comparing it with the commonly used O-arm navigation system.
In this study, we found that the accuracy of screw implantation and the protection of the facet joints in the robot group were better than those in the navigation group. Most results of the subgroup analysis of facet joint violation showed no differences, which may be due to the fact that the overall statistical difference was diluted by the size of the subgroups. Nevertheless, the robot group still had 1 intraoperative screw revision (0.4%), although there was no statistical difference in the revision rate between the 2 groups (P=0.222). In addition, there were no screw-related neurological complications in the robot group. We found that the accuracy of screw implantation in the Tinavi orthopedic robot was as high as 99.6%, which is higher than that of the SpineAssist/Renaissance system reported in previous studies (98.5%) [11,12]. The accuracy and other advantages and disadvantages of these 2 robots can be compared in the future. Han et al. [18] designed a prospective randomized controlled trial to compare the safety and accuracy of pedicle screw placement using the TiRobot system versus conventional fluoroscopy in thoracolumbar spinal surgery. They found that in the Tinavi group, 95.3% of screws were Grade A (perfectly positioned), the remaining screws were Grade B (3.4%), and the proportion of clinically acceptable screws was significantly greater in the Tinavi group than in the free-hand group. The screw accuracy we report in the current study is higher than the results of this prospective randomized controlled trial.
The clinical outcomes on the time for surgery, blood loss during surgery, and the length of hospital stays in this study are not very convincing. First, our main endpoint – accuracy of screw implantation – included patients with a variety of diagnoses; therefore, additional surgical procedures varied according to the different major diagnoses. In particular, the proportion of patients undergoing open surgery in the navigation group was higher than that in the robot group, which likely caused the average operation time, intraoperative blood loss, and postoperative hospital stays in the navigation group to be higher than those in the robot group, resulting in a huge deviation of the research results, or even possibly false positives. Therefore, the comparison of clinical results requires further prospective study design for analysis. Second, data such as intraoperative fluoroscopic dose could not be obtained because of the retrospective research methods. In summary, the comparison of clinical results does not provide relevant and reliable evidence in the comparison of these 2 surgical techniques.
Previous literature shows that surgery guided by O-arm navigation has the advantages of visibility, transparency, and predictability, and thus improves the accuracy and safety of surgery [19]. O-arm navigation has a wide range of applications, including cervical, thoracic, lumbar, trauma and pelvic surgery. However, exposure to a large dose of radiation during surgery is an inevitable problem with this system [20]. Lange et al. [21] reported that the radiation dose of 3D scanning of thoracolumbar vertebrae is about 3–8 mSV. Particularly, the limitation of O-arm scanning range in long segment screw implantation requires 2 or more 3D scans and inputs to the navigation system, increasing the operation time and radiation dose. In addition, scholars have observed a “drift” phenomenon – namely, a relative shift in the anatomical position of the surgical object in the 3D navigation image that occurs when the pedicle screw is placed with the aid of navigation [22]. At present, there is no evidence to prove that the drift phenomenon of the O-arm navigation system is caused by software and hardware failures or loopholes of the navigation system, but the occasional occurrence of the drift phenomenon directly affects the reliability of the O-arm navigation system.
The Tinavi robot system was designed by doctors from a clinical perspective. The advanced bionic structure ensures the flexibility and stability of the system. The comprehensive security protection mechanism can ensure the safe operation of the robot with strong practicability, a high degree of freedom, and good repeatability. Previous studies have reported that it can also significantly reduce intraoperative radiation exposure [23]. In addition, it can help young spinal surgeons rapidly improve their surgical techniques while shortening their learning curve [24]. Safety is the premise of the application and promotion of robotic surgery; nevertheless, clinicians often stop using robotic surgery because they are worried about its intraoperative safety. The Tinavi robot does not enter a patient’s body, it assists the doctor in completing an accurate operation, and it has multiple safety strategies, including a safety activity control area, safety control strategy, and emergency operation brake light [25,26], which can fully meet surgical safety requirements.
However, any technical equipment has certain disadvantages. First, the Tinavi system is expensive to purchase, use, and maintain, making it difficult to gain popularity. Second, its technical disadvantages include the 7 following: 1) Systematic errors inevitably occur in the process of 3D image data reconstruction and image automatic registration. During surgery, the 3D image obtained by the 3D system has a certain degree of distortion due to the deflection of the electromagnetic field in the imaging process [27]. This error does not change with the replacement of the equipment because it is determined by the imaging principle of the image. 2) During the automatic registration of 3D images and the navigation system guiding the robotic arm to move, systematic error of the surgical robot increases due to the error of optical reflection between the infrared stereo camera and the tracker. 3) Respiratory management (fluctuation of the chest) during surgery affects image registration. 4) The guiding cannula can easily skid if the screw implantation channel is not planned properly on the matching 3D image, such as in choosing the entry point on the slope of the upper articular process, thereby creating a deviation [14]. 5) The position of the cannula is affected by factors such as excessive soft tissue pressure, skidding of bone surface, and improper drilling force during surgery. For example, the soft tissue pressure is high in obese patients or patients with developed lumbar and dorsal muscles, leading to cannula displacement, or even dangerous medial deviation [16]. 6) The unstable installation of the robot during guiding pin insertion leads to a decrease in the accuracy of pin placement [28] because the unstable fixation can lead to relative motion between the patient and the robot [15,16]. Some researchers [29] found that the use of excessive force to the cannula also leads to the relative movement between the vertebral body and the instrument, resulting in position deviation of the guide wire implantation. 7) The Tinavi robot also has a learning curve, and, as in open surgery, the operator’s experience has an unnegligible influence on robotic surgery [15].
There are some limitations in this study. We are still in the early stage of using the Tinavi robot, so the sample size of the study is insufficient. We need to increase the number of cases to enhance the credibility of the study’s conclusions. Use of a retrospective research method inevitably loses some clinical data and, therefore, there is a possibility of selection bias. A prospective study design combined with more comprehensive evaluation indicators is needed to analyze other clinical outcomes.
Conclusions
The Tinavi orthopedic robot meets doctors’ basic requirements for surgical robots, and has high accuracy, good repeatability, and strong stability. The Tinavi orthopedic robot can significantly improve the surgical accuracy and safety of pedicle screw fixation, as compared with that of O-arm navigation technology, without increasing complications. Although there are still many problems to solve, it shows great potential in clinical application.
Figures
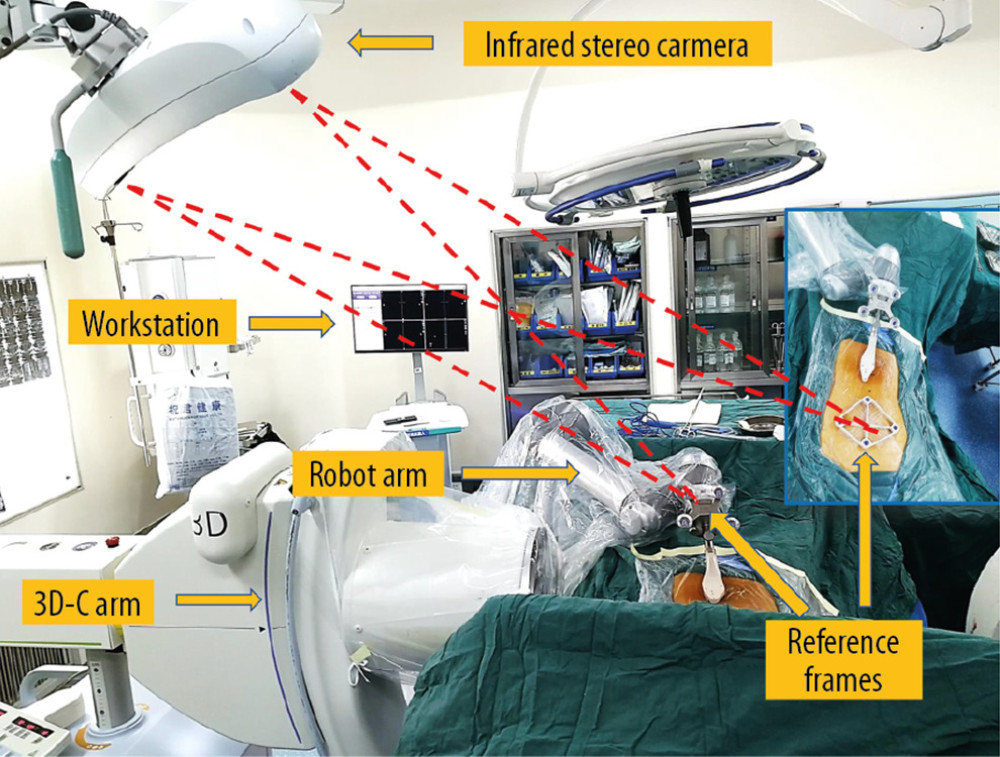 Figure 1. Diagram of the Tinavi Robot system.
Figure 1. Diagram of the Tinavi Robot system. 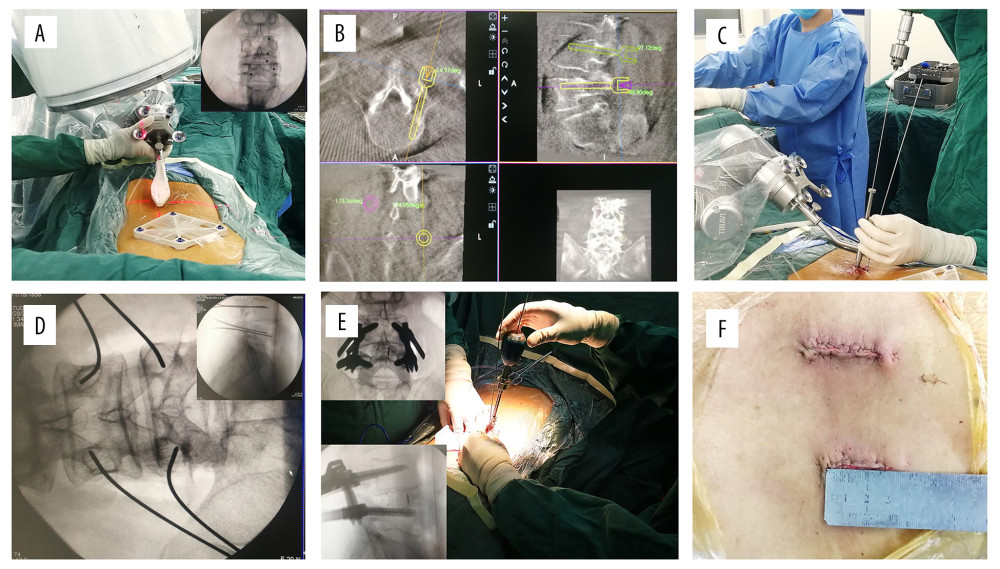 Figure 2. Surgical workflow of the robotic system assistance. (A) Locate positioning ruler at the position of target vertebra, reconstruct 3D images by 3D C-arm and upload them to workstation; (B) Design the best virtual screw trajectory on 3D image; (C) The electric drill is implanted with the guiding pin along the direction of the guiding cannula; (D) C-arm fluoroscopy to determine the position of the guiding pin; (E) The pedicle screw is placed along the pin, and then verified by fluoroscopy again; (F) Postoperative wound.
Figure 2. Surgical workflow of the robotic system assistance. (A) Locate positioning ruler at the position of target vertebra, reconstruct 3D images by 3D C-arm and upload them to workstation; (B) Design the best virtual screw trajectory on 3D image; (C) The electric drill is implanted with the guiding pin along the direction of the guiding cannula; (D) C-arm fluoroscopy to determine the position of the guiding pin; (E) The pedicle screw is placed along the pin, and then verified by fluoroscopy again; (F) Postoperative wound. 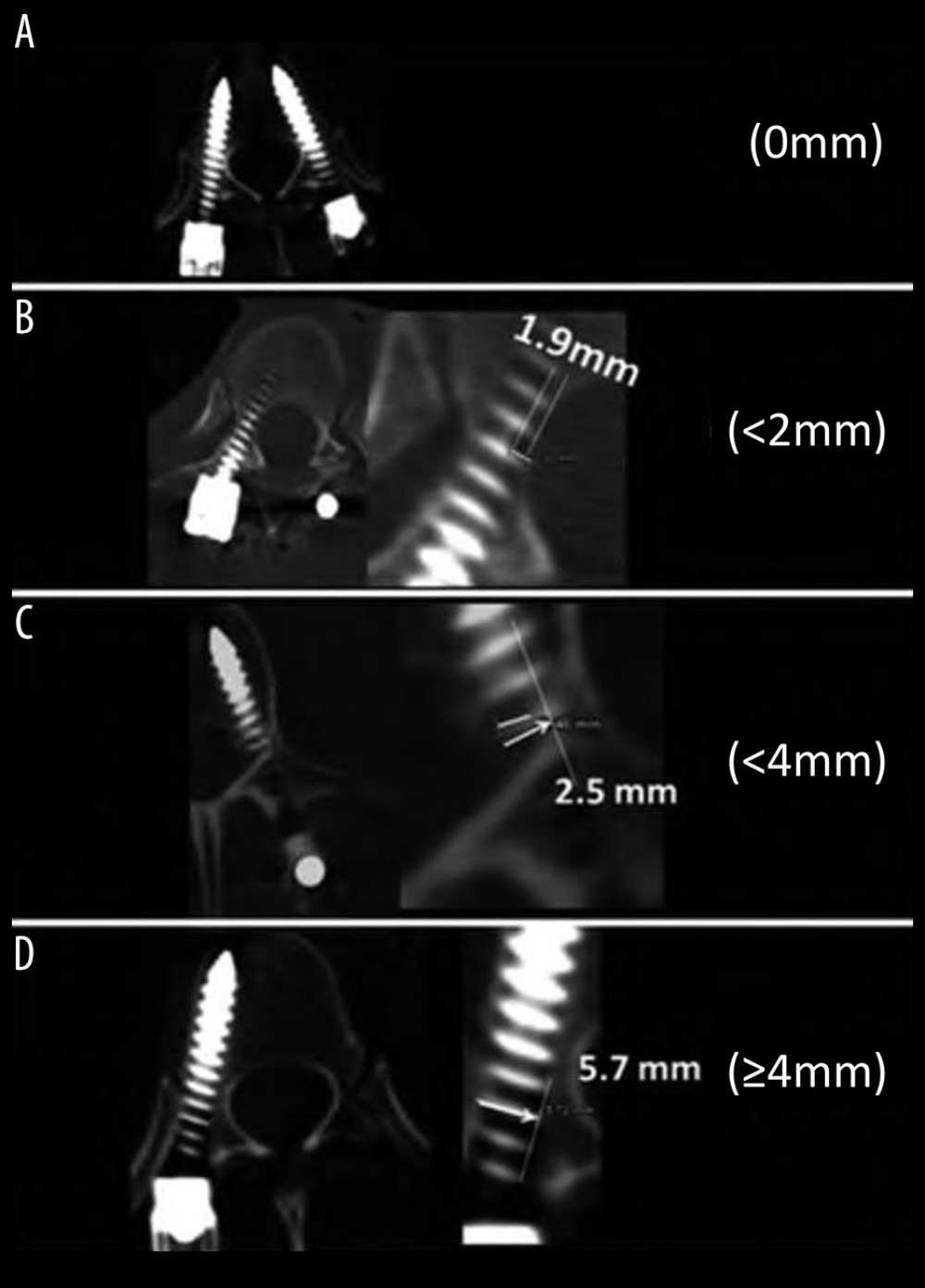 Figure 3. (A–D) Rampersaud classification according to CT scans shows the deviation of the screw from the optimal trajectory.
Figure 3. (A–D) Rampersaud classification according to CT scans shows the deviation of the screw from the optimal trajectory. 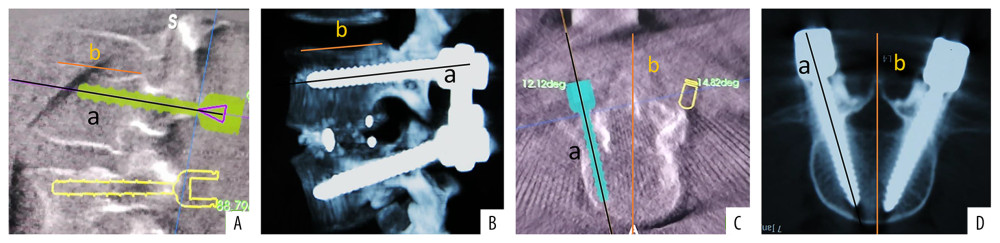 Figure 4. (A, B) Intraoperative 3D image and sagittal image reconstructed by postoperative CT scan; Deviation sagittal = B (postoperative angle between auxiliary line a and auxiliary line b) – A (intraoperative angle between auxiliary line a and auxiliary line b). (C, D) Intraoperative 3D image and transversal image reconstructed by postoperative CT scan; Deviation transversal – D (postoperative angle between auxiliary line a and auxiliary line b) – C (intraoperative angle between auxiliary line a and auxiliary line b).
Figure 4. (A, B) Intraoperative 3D image and sagittal image reconstructed by postoperative CT scan; Deviation sagittal = B (postoperative angle between auxiliary line a and auxiliary line b) – A (intraoperative angle between auxiliary line a and auxiliary line b). (C, D) Intraoperative 3D image and transversal image reconstructed by postoperative CT scan; Deviation transversal – D (postoperative angle between auxiliary line a and auxiliary line b) – C (intraoperative angle between auxiliary line a and auxiliary line b). 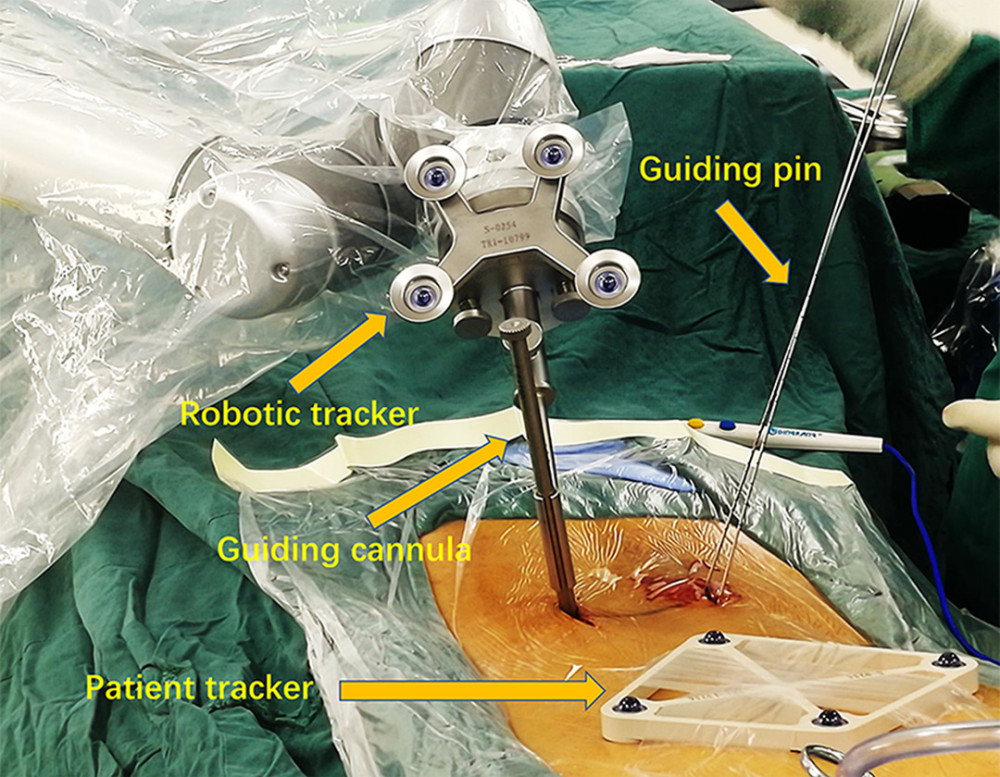 Figure 5. Detail shows guiding pin insertion with assistance of Tinavi robot system.
Figure 5. Detail shows guiding pin insertion with assistance of Tinavi robot system. References
1. Tan SH, Teo EC, Chua HC, Quantitative three-dimensional anatomy of cervical, thoracic and lumbar vertebrae of Chinese Singaporeans: Eur Spine J, 2004; 13; 137-46
2. Tian W, Liu Y, Zheng S, Lv Y, Accuracy of lower cervical pedicle screw placement with assistance of distinct navigation systems: A human cadaveric study: Eur Spine J, 2013; 22; 148-55
3. Tian NF, Huang QS, Zhou P, Pedicle screw insertion accuracy with different assisted methods: A systematic review and meta-analysis of comparative studies: Eur Spine J, 2011; 20; 846-59
4. Devito DP, Kaplan L, Dietl R, Clinical acceptance and accuracy assessment of spinal implants guided with SpineAssist surgical robot: Retrospective study: Spine (Phila Pa 1976), 2010; 35; 2109-115
5. Gautschi OP, Schatlo B, Schaller K, Tessitore E, Clinically relevant complications related to pedicle screw placement in thoracolumbar surgery and their management: A literature review of 35,630 pedicle screws: Neurosurg Focus, 2011; 31; E8
6. Houten JK, Nasser R, Baxi N, Clinical assessment of percutaneous lumbar pedicle screw placement using the O-arm multidimensional surgical imaging system: Neurosurgery, 2015; 70; 990-95
7. Shin MH, Hur JW, Ryu KS, Park CK: J Spinal Disord Tech, 2013; 28(6); E347-51
8. Fan Y, Du J, Zhang J, Comparison of accuracy of pedicle screw insertion among 4 guided technologies in spine surgery: Med Sci Monit, 2017; 23; 5960-68
9. Rampersaud YR, Pik JH, Salonen D, Farooq S, Clinical accuracy of fluoroscopic computer-assisted pedicle screw fixation: A CT analysis: Spine (Phila Pa 1976), 2005; 30; E183-90
10. Kim TH, Lee BH, Moon SH, Comparison of adjacent segment degeneration after successful posterolateral fusion with unilateral or bilateral pedicle screw instrumentation: A minimum 10-year follow-up: Spine J, 2013; 13; 1208-16
11. Hyun SJ, Kim KJ, Jahng TA, Kim HJ: Spine (Phila Pa 1976), 2017; 42(6); 353-58
12. Kim HJ, Jung WI, Chang BS: Int J Med Robot, 2016; 13(3)
13. Lieberman IH, Hardenbrook MA, Wang JC, Guyer RD, Assessment of pedicle screw placement accuracy, procedure time, and radiation exposure using a miniature robotic guidance system: J Spinal Disord Tech, 2012; 25; 241-48
14. Ringel F, Stuer C, Reinke A, Accuracy of robot-assisted placement of lumbar and sacral pedicle screws: A prospective randomized comparison to conventional freehand screw implantation: Spine (Phila Pa 1976), 2012; 37; E496-501
15. Hu XB, Ohnmeiss DD, Lieberman IH, Robotic-assisted pedicle screw placement: Lessons learned from the first 102 patients: Eur Spine J, 2013; 22; 661-66
16. Tsai TH, Tzou RD, Su YF, Pedicle screw placement accuracy of bone-mounted miniature robot system: Medicine, 2017; 96(3); e5835
17. Zhang JN, Fan Y, Hao DJ, Risk factors for robot-assisted spinal pedicle screw malposition: Sci Rep, 2019; 9; 3025
18. Han X, Tian W, Liu Y, Safety and accuracy of robot-assisted versus fluoroscopy-assisted pedicle screw insertion in thoracolumbar spinal surgery: A prospective randomized controlled trial: J Neurosurg Spine, 2019 [Online ahead of print]
19. Verma SK, Singh PK, Agrawal D, O-arm with navigation versus C-arm: A review of screw placement over 3 years at a major trauma center: Br J Neurosurg, 2016; 30; 658-61
20. Takeba J, Umakoshi K, Kikuchi S: Eur J Orthop Surg Traumatol, 2018; 28; 431-38
21. Lange J, Karellas A, Street J, Estimating the effective radiation dose imparted to patients by intraoperative cone-beam computed tomography in thoracolumbar spinal surgery: Spine (Phila Pa 1976), 2013; 38; E306-12
22. Rivkin MA, Yocom SS, Thoracolumbar instrumentation with CT-guided navigation (O-arm) in 270 consecutive patients: Accuracy rates and lessons learned: Neurosurg Focus, 2014; 36; E7
23. Wu JY, Yuan Q, Liu YJ, Robot-assisted percutaneous transfacet screw fixation supplementing oblique lateral interbody fusion procedure: Accuracy and safety evaluation of this novel minimally invasive technique: Orthop Surg, 2019; 11; 25-33
24. Fan MX, Liu YJ, Duan FF, Learning curve and clinical outcomes of robot assisted thoracolumbar pedicle screw fixation: J Clin Orthop Res, 2003; 213-17
25. Tian W, Wang H, Liu YJ, Robot-assisted anterior odontoid screw fixation: A case report: Orthop Surg, 2016; 8(3); 400-4
26. Wu JY, Yuan Q, Liu YJ, Robot-assisted percutaneous transfacet screw fixation supplementing oblique lateral interbody fusion procedure: Accuracy and safety evaluation of this novel minimally invasive technique: Orthop Surg, 2019; 11(1); 25-33
27. L’Orsa R, Macnab CJ, Tavakoli M, Introduction to haptics for neurosurgeons: Neurosurgery, 2013; 72(Suppl 1); 139-53
28. Roser F, Tatagiba M, Maier G, Spinal robotics: Current applications and future perspectives: Neurosurgery, 2013; 72(Suppl 1); 12-18
29. Schizas C, Thein E, Kwiatkowski B, Kulik G, Pedicle screw insertion: Robotic assistance versus conventional C-arm fluoroscopy: Acta Orthop Belg, 2012; 78; 240-45
Figures
Figure 1. Diagram of the Tinavi Robot system.Figure 2. Surgical workflow of the robotic system assistance. (A) Locate positioning ruler at the position of target vertebra, reconstruct 3D images by 3D C-arm and upload them to workstation; (B) Design the best virtual screw trajectory on 3D image; (C) The electric drill is implanted with the guiding pin along the direction of the guiding cannula; (D) C-arm fluoroscopy to determine the position of the guiding pin; (E) The pedicle screw is placed along the pin, and then verified by fluoroscopy again; (F) Postoperative wound.Figure 3. (A–D) Rampersaud classification according to CT scans shows the deviation of the screw from the optimal trajectory.Figure 4. (A, B) Intraoperative 3D image and sagittal image reconstructed by postoperative CT scan; Deviation sagittal = B (postoperative angle between auxiliary line a and auxiliary line b) – A (intraoperative angle between auxiliary line a and auxiliary line b). (C, D) Intraoperative 3D image and transversal image reconstructed by postoperative CT scan; Deviation transversal – D (postoperative angle between auxiliary line a and auxiliary line b) – C (intraoperative angle between auxiliary line a and auxiliary line b).Figure 5. Detail shows guiding pin insertion with assistance of Tinavi robot system. Tables
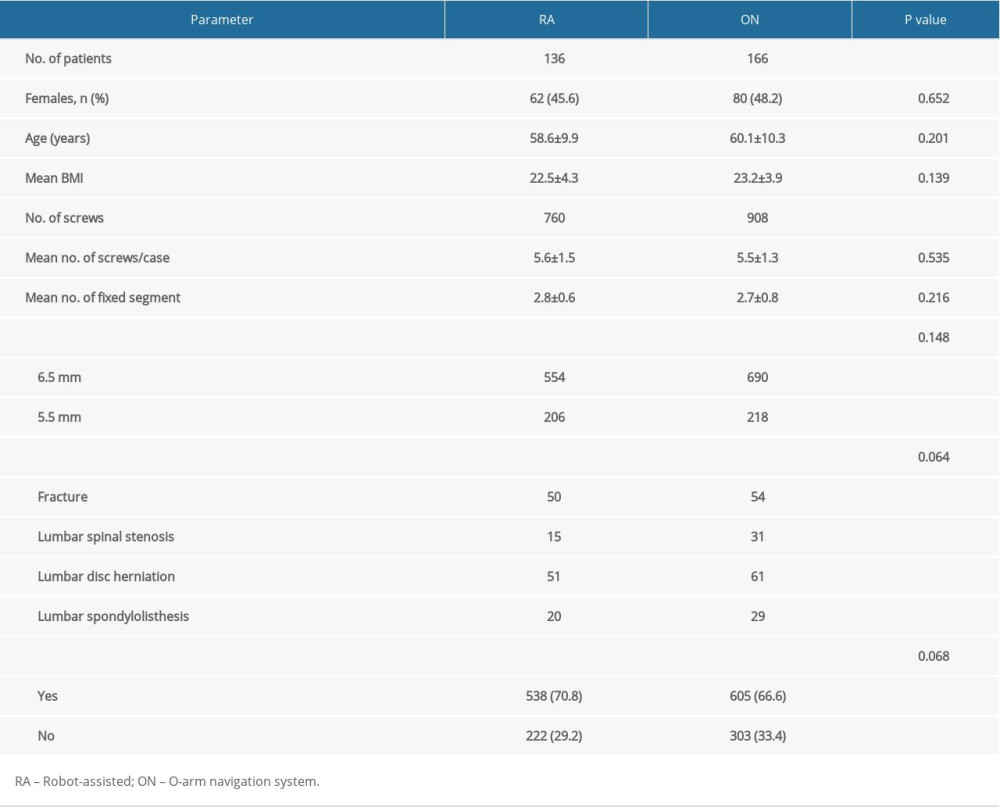 Table 1. Baseline characteristics.
Table 1. Baseline characteristics.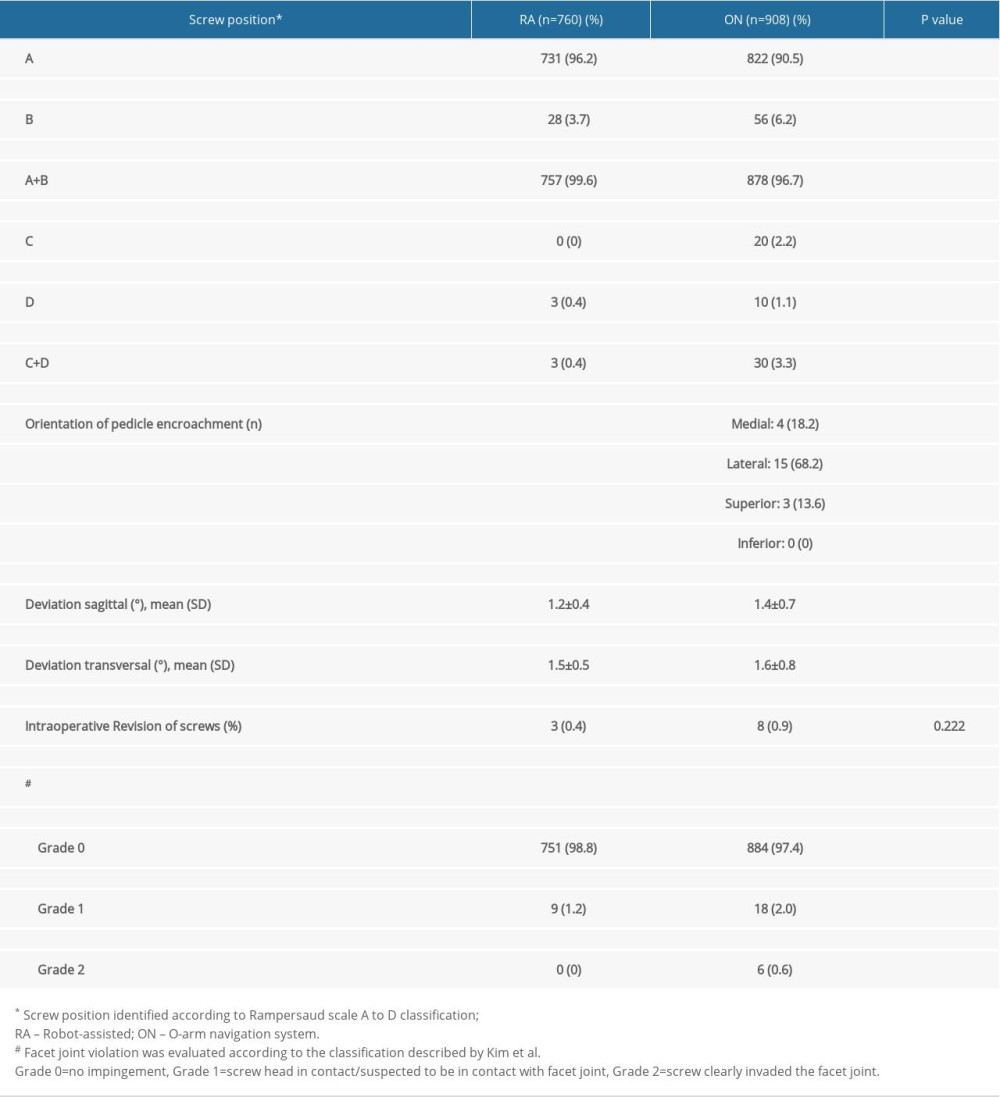 Table 2. Accuracy of pedicle screw placement between the 2 technologies.
Table 2. Accuracy of pedicle screw placement between the 2 technologies.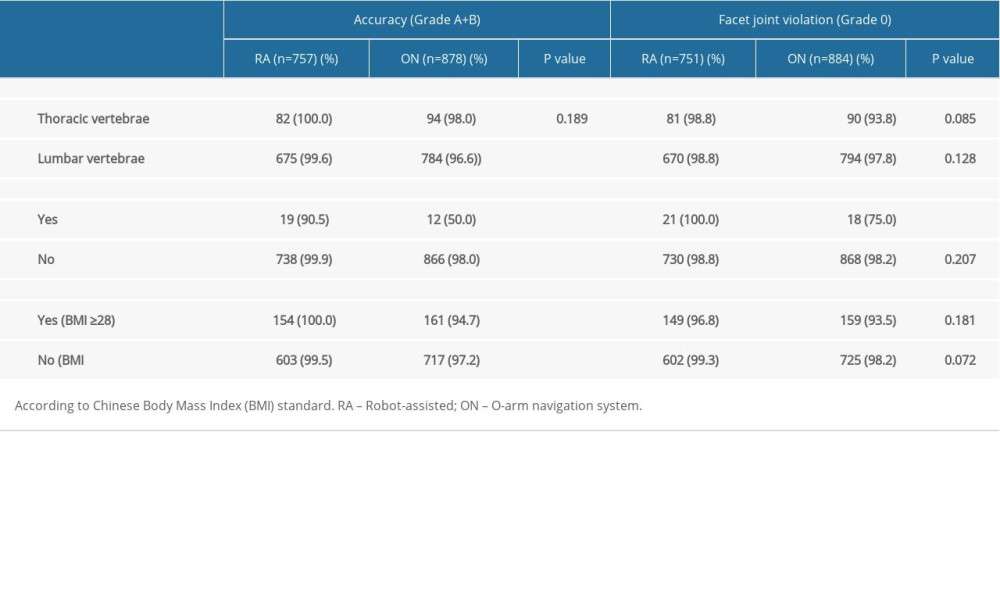 Table 3. Subgroup analysis for partial primary outcomes.
Table 3. Subgroup analysis for partial primary outcomes.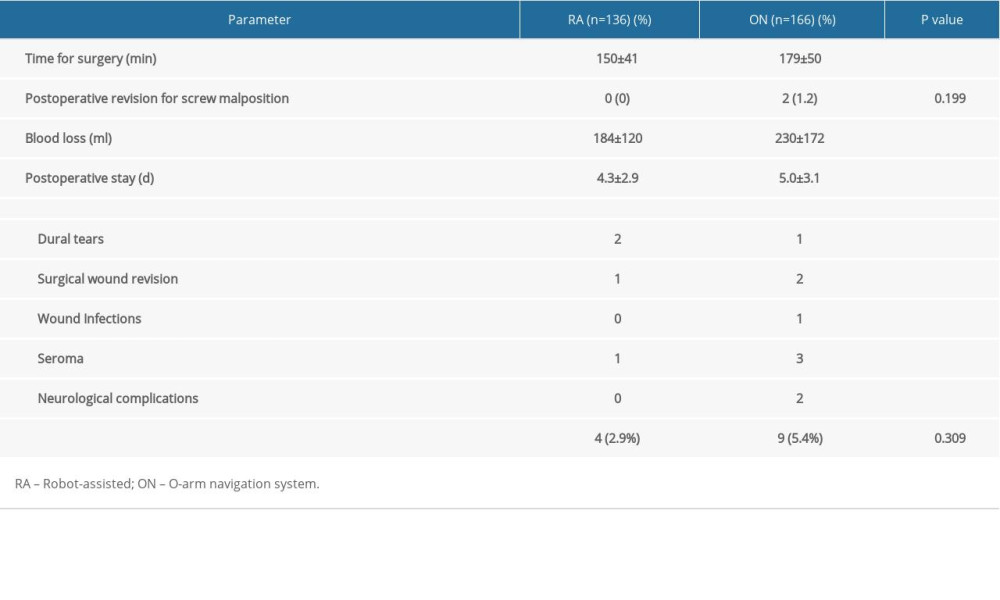 Table 4. Comparison of clinical outcomes between the 2 technologies.Table 1. Baseline characteristics.Table 2. Accuracy of pedicle screw placement between the 2 technologies.Table 3. Subgroup analysis for partial primary outcomes.Table 4. Comparison of clinical outcomes between the 2 technologies.
Table 4. Comparison of clinical outcomes between the 2 technologies.Table 1. Baseline characteristics.Table 2. Accuracy of pedicle screw placement between the 2 technologies.Table 3. Subgroup analysis for partial primary outcomes.Table 4. Comparison of clinical outcomes between the 2 technologies. In Press
07 Mar 2024 : Clinical Research
Knowledge of and Attitudes Toward Clinical Trials: A Questionnaire-Based Study of 179 Male Third- and Fourt...Med Sci Monit In Press; DOI: 10.12659/MSM.943468
08 Mar 2024 : Animal Research
Modification of Experimental Model of Necrotizing Enterocolitis (NEC) in Rat Pups by Single Exposure to Hyp...Med Sci Monit In Press; DOI: 10.12659/MSM.943443
18 Apr 2024 : Clinical Research
Comparative Analysis of Open and Closed Sphincterotomy for the Treatment of Chronic Anal Fissure: Safety an...Med Sci Monit In Press; DOI: 10.12659/MSM.944127
08 Mar 2024 : Laboratory Research
Evaluation of Retentive Strength of 50 Endodontically-Treated Single-Rooted Mandibular Second Premolars Res...Med Sci Monit In Press; DOI: 10.12659/MSM.944110
Most Viewed Current Articles
17 Jan 2024 : Review article
Vaccination Guidelines for Pregnant Women: Addressing COVID-19 and the Omicron VariantDOI :10.12659/MSM.942799
Med Sci Monit 2024; 30:e942799
14 Dec 2022 : Clinical Research
Prevalence and Variability of Allergen-Specific Immunoglobulin E in Patients with Elevated Tryptase LevelsDOI :10.12659/MSM.937990
Med Sci Monit 2022; 28:e937990
16 May 2023 : Clinical Research
Electrophysiological Testing for an Auditory Processing Disorder and Reading Performance in 54 School Stude...DOI :10.12659/MSM.940387
Med Sci Monit 2023; 29:e940387
01 Jan 2022 : Editorial
Editorial: Current Status of Oral Antiviral Drug Treatments for SARS-CoV-2 Infection in Non-Hospitalized Pa...DOI :10.12659/MSM.935952
Med Sci Monit 2022; 28:e935952